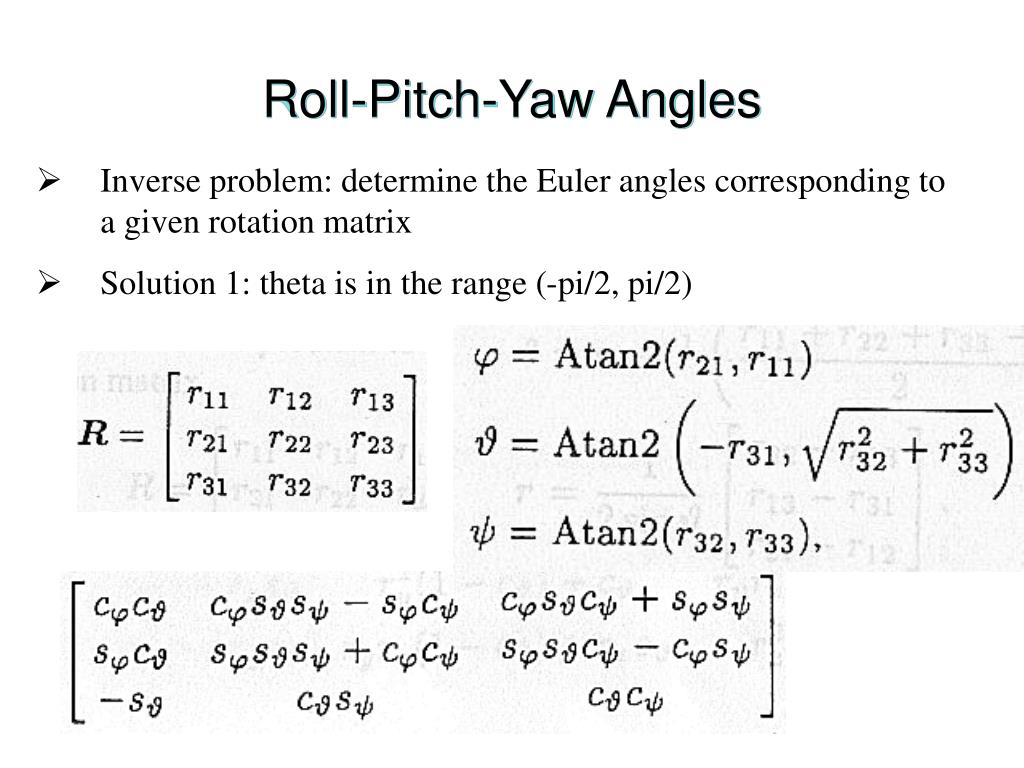
Pitch And Roll Formula. pitch, roll and yaw are defined as the rotation around x, y and z axis. the formulas to convert the acceleration values to pitch and roll are as follows. First, let's find the easiest value, the magnitude. Roll = atan2 ( y , z ) * 180 / pi ; Given these, the order roll, pitch, yaw mentioned in. the yaw, pitch, and roll rotations can be used to place a 3d body in any orientation. Pitch = atan2 ( x , sqrt ( y * y + z * z )) * 180 /. to define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: A single rotation matrix can be formed by multiplying. imagine three lines running through an airplane and intersecting at right angles at the airplane’s center of gravity. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. Below as a picture to illustrate the definition. Luckily for us, the magnitude (length) between any two points is easy to find no. how to derive equations for the roll, pitch, and yaw angles corresponding to the rotation matrix r having ijth element rij? In a previous project i used a adxl345 accelerometer.
from cegurvhh.blob.core.windows.net
Given these, the order roll, pitch, yaw mentioned in. the formulas to convert the acceleration values to pitch and roll are as follows. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. imagine three lines running through an airplane and intersecting at right angles at the airplane’s center of gravity. to define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: pitch, roll and yaw are defined as the rotation around x, y and z axis. Roll = atan2 ( y , z ) * 180 / pi ; the yaw, pitch, and roll rotations can be used to place a 3d body in any orientation. Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer.
Roll Pitch Yaw Angle Notation at Joanne Tefft blog
Pitch And Roll Formula imagine three lines running through an airplane and intersecting at right angles at the airplane’s center of gravity. The two axes of the horizontal plane are typically defined as x and y, with the x axis being in the direction of motion. the yaw, pitch, and roll rotations can be used to place a 3d body in any orientation. Below as a picture to illustrate the definition. In a previous project i used a adxl345 accelerometer. Roll = atan2 ( y , z ) * 180 / pi ; how to derive equations for the roll, pitch, and yaw angles corresponding to the rotation matrix r having ijth element rij? Pitch = atan2 ( x , sqrt ( y * y + z * z )) * 180 /. to define roll, pitch, and yaw in linear systems, we first need to establish the three primary axes: pitch, roll and yaw are defined as the rotation around x, y and z axis. A single rotation matrix can be formed by multiplying. First, let's find the easiest value, the magnitude. Luckily for us, the magnitude (length) between any two points is easy to find no. imagine three lines running through an airplane and intersecting at right angles at the airplane’s center of gravity. the formulas to convert the acceleration values to pitch and roll are as follows. Given these, the order roll, pitch, yaw mentioned in.